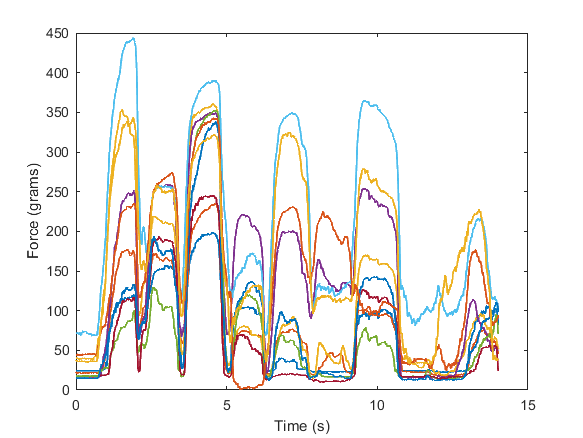
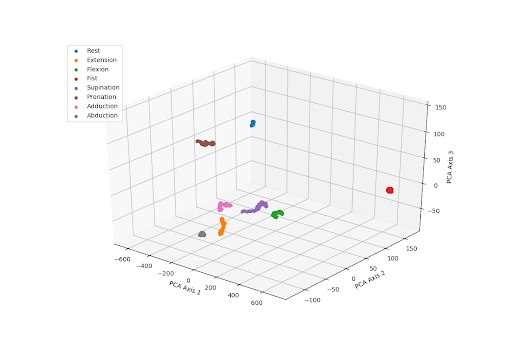
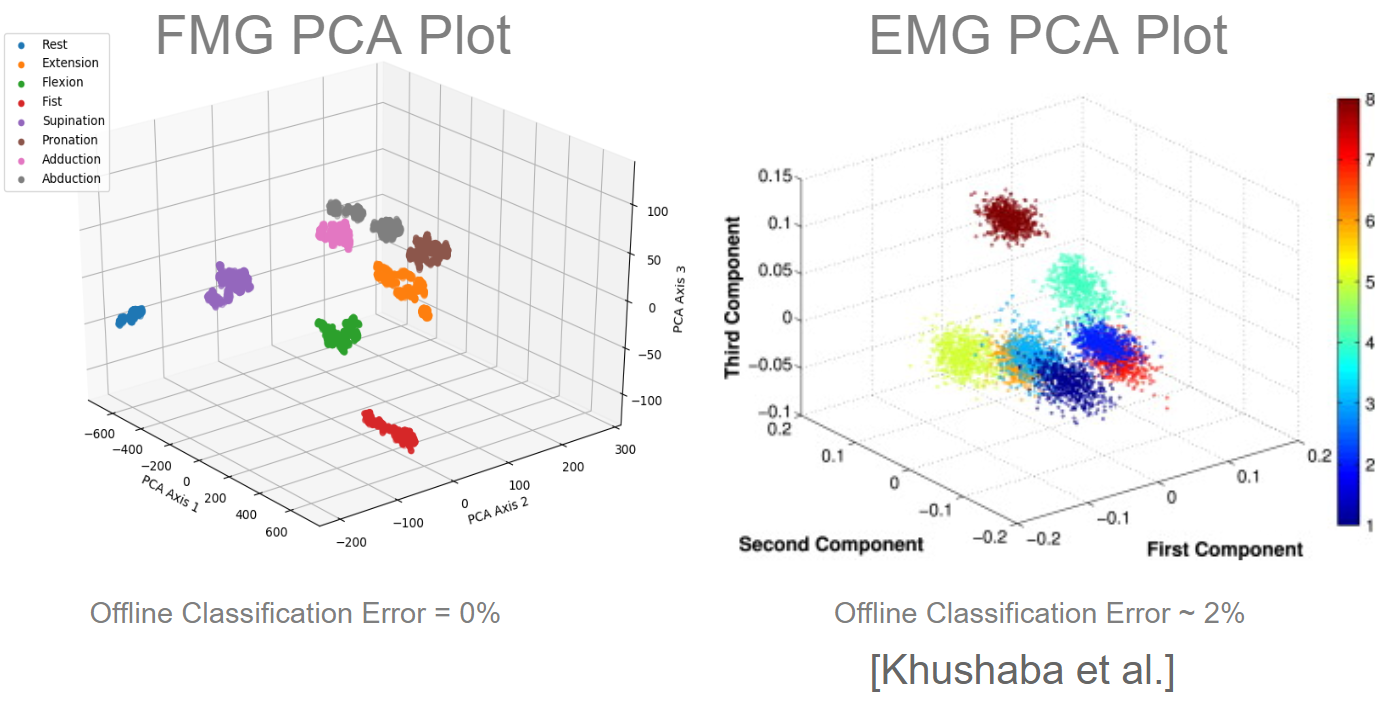
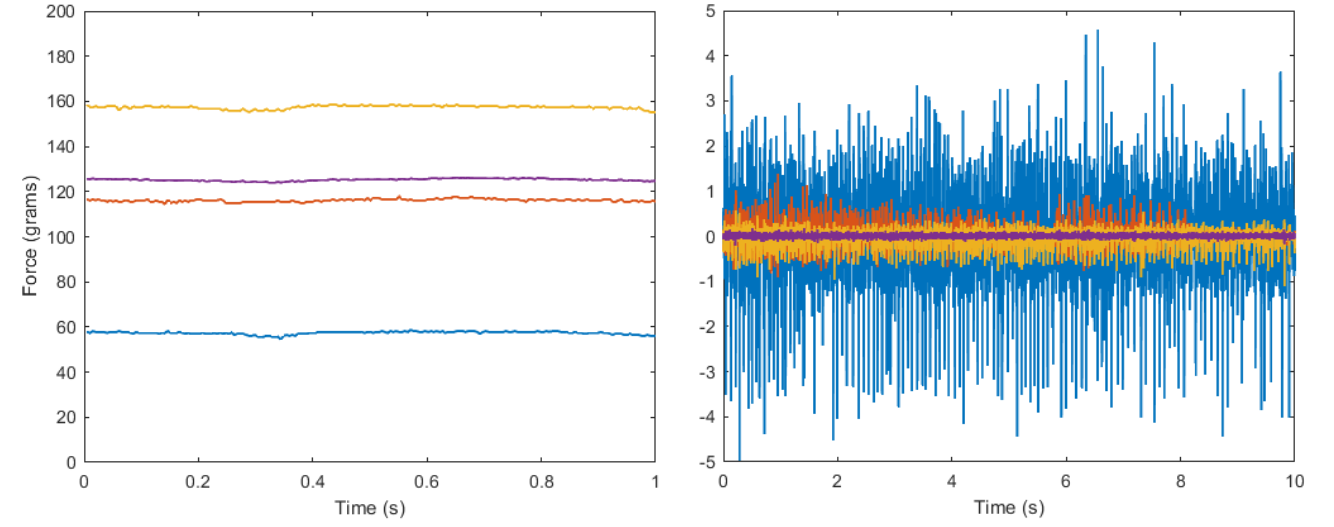
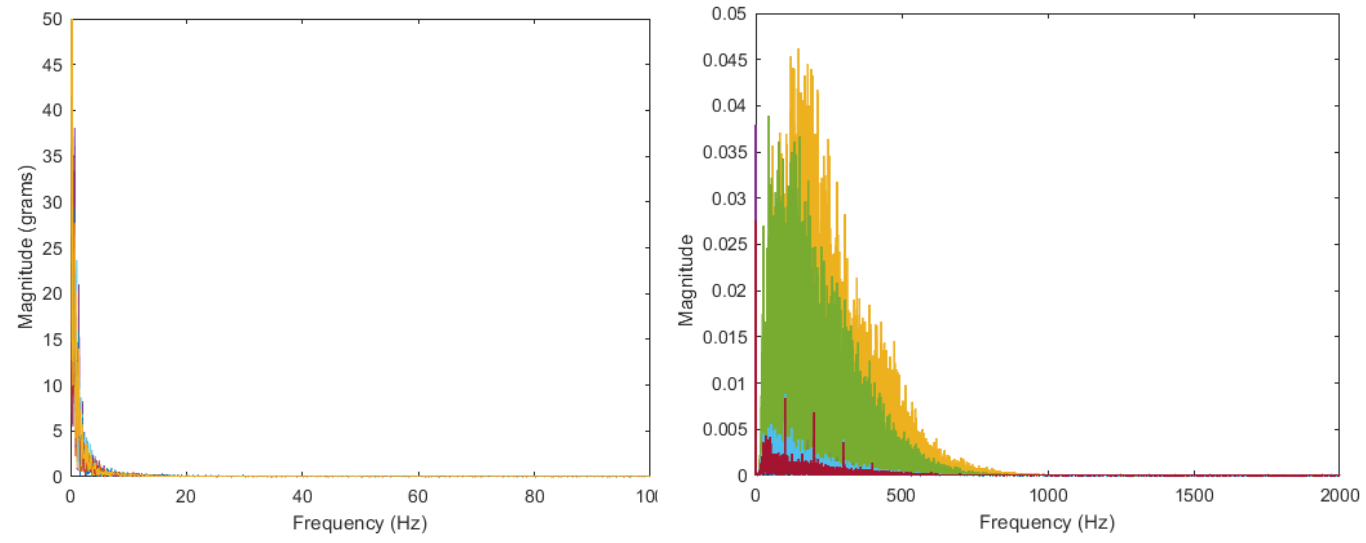
Each FSR cost is around $10, whereas EMG electrodes can be upwards of $1000. This is because the signal processing required to read the tiny voltage signals inside the muscles from the skin’s surface is quite difficult. The EMG signal is inherently oscillatory even when muscles hold a contraction, with the useful frequency range being between 10-250 Hz. To use this frequency range, a high sample rate >500Hz is required. FMG signals, on the other hand, are not time-varying under constant muscle contraction, making the signal much easier to interpret. Feature extraction techniques are mandatory when using pattern recognition techniques with EMG due to the sinusoidal signals. Window sizes of 250ms are typically used to calculate input features. Feature sets previously investigated include time-domain (mean absolute value, zero crossings, etc.), frequency domain, wavelet, and many more. On the other hand, no feature extraction is necessary with FMG signals. Classification accuracy for FMG is typically reported as higher than EMG. For both EMG and FMG, classifier choice has little impact on accuracy. To visualize separability, an open-source EMG dataset with similar gesture classifications was compared.
EMG comparison data obtained from:
R. N. Khushaba, Maen Takruri, Jaime Valls Miro, and Sarath Kodagoda, “Towards limb position invariant myoelectric pattern recognition using time-dependent spectral features,” Neural Networks, vol. 55, pp. 42-58, 2014. https://doi.org/10.1016/j.neunet.2014.03.010